
ドローンの代表的な産業用途である「測量」について、解説してみたいと思います。
まずは定番の「写真測量」から。
この記事を読むことで、「写真測量の方法」「写真測量に必要な機材」が分かります!
写真測量の原理
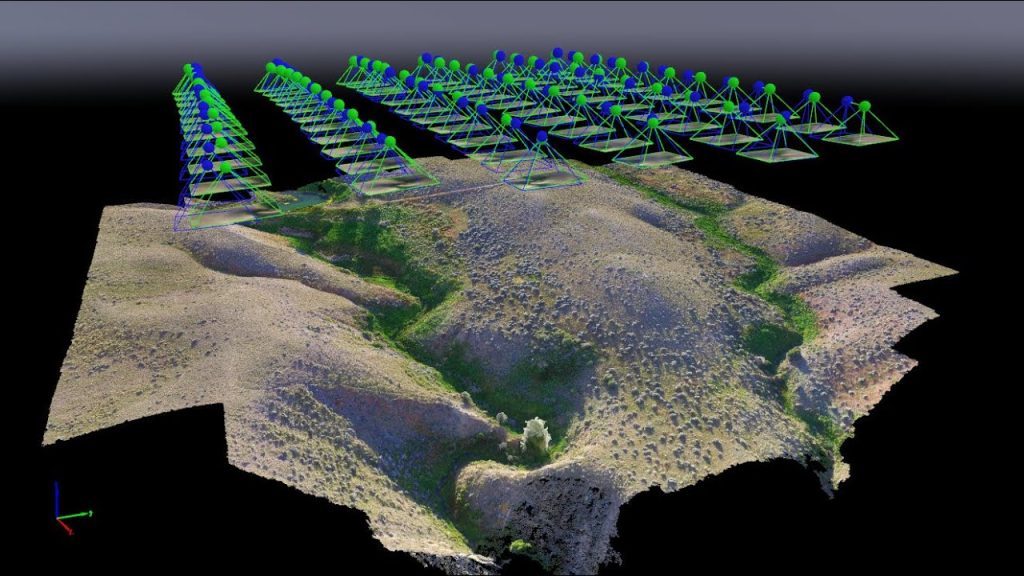
写真測量とは、複数の異なる視点から撮影された写真群から、対象物の3次元形状(点群データ)を復元したり、オルソ画像を生成する技術のことです。
1.特徴点抽出とマッチング
複数の写真に共通して写っている「特徴点」(建物の角、模様など、認識しやすい点)を自動で抽出し、それぞれの写真における同じ特徴点を紐付けます。

2.カメラ位置・姿勢の推定
写真に記録された撮影時の位置情報(ジオタグ)やIMUの情報を元に、カメラ=ドローンの位置と姿勢(向き)を推定します。
3.3D点群の生成
カメラの位置と姿勢、そして特徴点の情報に基づいて、対象物の3次元座標(点群)を生成します。
ドローンを使用することにより上空から広範囲の地形を一度に撮影できるため、地上測量に比べて作業時間を大幅に短縮することができます。
また、生成された点群データを使用することで土量計算、工事進捗管理、出来形管理などを高精度かつ効率的に行えます。
写真測量の方法
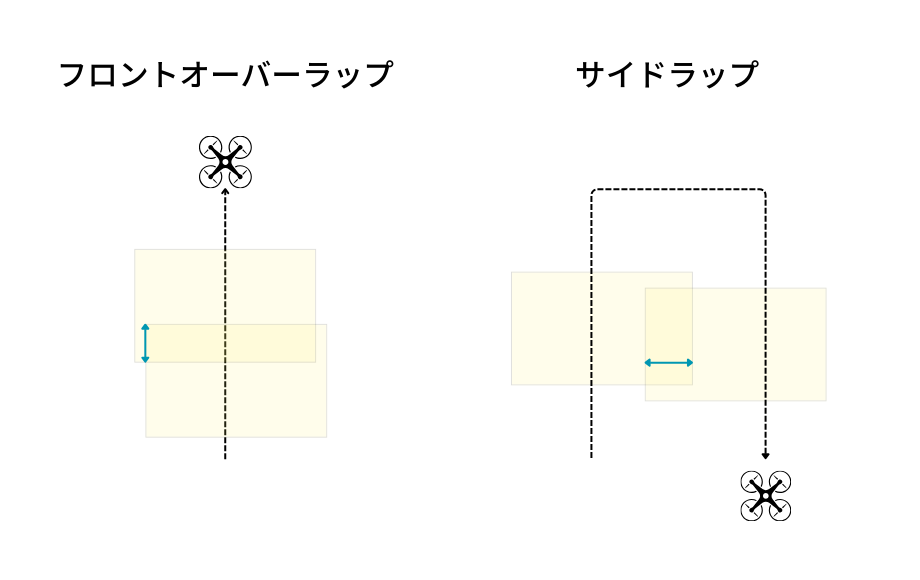
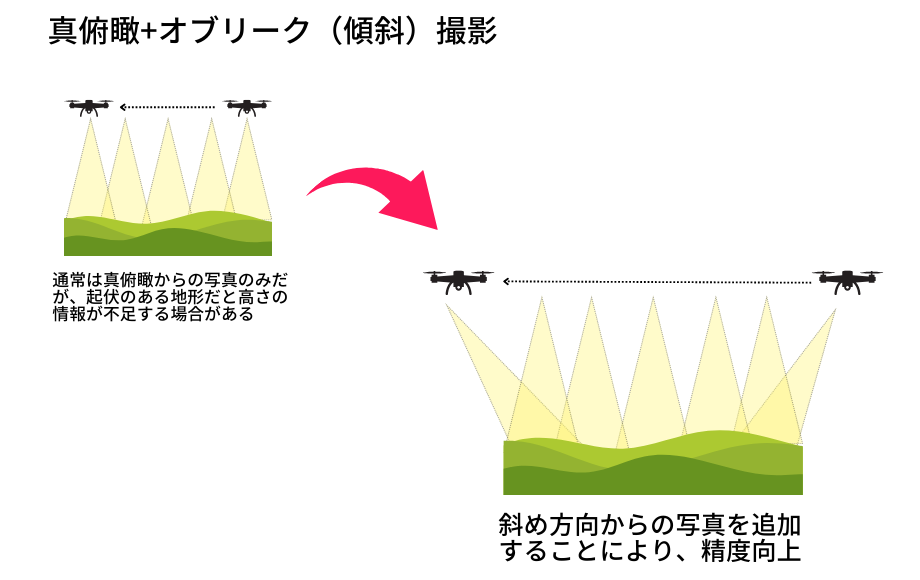
ドローンは計測範囲上空を飛行しながらカメラを真俯瞰に向けて、均等なタイミングで写真を撮影していきます。
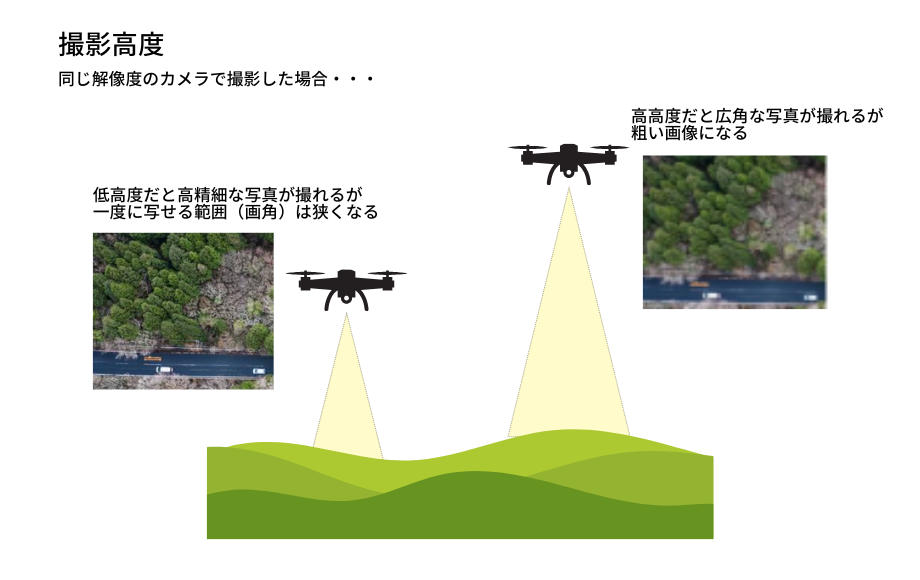
この時、隣接写真の重なり具合(ラップ率)が正確であることや要求解像度に応じた撮影高度の設定が重要です。また、高低差のある地形の場合は真俯瞰撮影に加えて斜め方向からの撮影をおこなうことで、側面の情報を補完してより正確なデータを作ることができます。
ラップ率と高度は「UAVを用いた公共測量マニュアル(案)」を参考に設定します。
UAVを用いた公共測量マニュアル(案) 出典:国土交通省
撮影した写真を「DJI Terra」や「Agisoft metashape」などのsfmソフトで処理することで、点群データが完成します。
対空標識の設置
こうして生成された点群データですが、データに緯度経度の座標は含んでいるものの「精度」が分からない状態です。
GPS測位ドローンで補正なしで生成した点群は30cm~1m程度の誤差を持っており、またsfm処理の過程で全体に歪が発生している可能性があります。
そこで、後処理で歪の補正や精度の検証をおこなうために必要なのが対空標識です。
実はドローン飛行の前、一番最初に必要な作業が「対空標識の設置」です。

対空標識は評定点(=歪の補正用)と検証点(=精度の検証用)があり、「UAVを用いた公共測量マニュアル(案)」を参考に計測範囲内に等間隔で設置します。
設置後、GNSSローバーやTSを使用して中心の座標を計測します。

その後、ドローンによる測量用自動航行を行います。
すると写真には対空標識が映り込み、sfm処理をかけると点群の中にも対空標識が認識されます。このデータ内の標定点に後処理で実測値を与えてやることで、全体の歪を補正します(ソフト内で自動的に処理されます)。
その後、検証点の実測値とデータ内の座標値を比較し誤差が判明することで、最終的な点群データの精度が確定する、という流れです。
RTKの有効性
写真測量に欠かせない対空標識ですが、現場によっては何十枚も必要で、設置場所の検討から設置、座標計測にかなりの時間を要するため、測量作業の大きな負担でもあります。
そこでこの負担を軽減し効率的な測量業務を支援するのが「RTK」という測位システムです。
写真のジオタグや飛行ルート、シャッタータイミングの精度が向上することにより、標定点を設置せずに高精度な測量データが生成可能です(検証点は必要です)。
この利便性の高さから現在のドローン写真測量の大半がこのRTK測位ドローンにより実施されています。

写真測量に適したドローン
写真測量に適したドローンを選定するにあたってのポイントは以下のとおりです。
1.RTK測位・自動航行に対応
RTKについては前述の通りです。
DJIドローンの場合、enterprise製品のほとんどが対応していますが、一部旧製品で外付けRTKモジュールが必要な場合がありますので、購入やレンタルの際は注意が必要です。
また、D-RTK 2やD-RTK 3などのモバイルステーションを使用する場合には機体とは別に調達する必要があります。
自動航行に関しては、写真測量で求められる精密な飛行はマニュアル操縦では困難なため、必須の機能です。
2.高解像度、センサーサイズの大きいカメラ
高精度の点群データを作成するには、高解像度の写真が不可欠です。画素数が多ければ多いほど、地面の小さな物体まで詳細に記録でき、より高密度で正確なデータが得られます。
またセンサーサイズが大きいほど、画質が向上し、低ノイズでシャープな画像が得られます。ドローンでは1インチ以上が写真測量に適しているとされます。
3.固定焦点距離レンズ
ズーム機能のない単焦点レンズが推奨されます。その理由は、ズームレンズは焦点距離が変わるたびにレンズの歪みが変化し、SfM処理の際に誤差の原因となるためです。
固定焦点距離のレンズを使用することで写真全体の歪みが一定になり、より正確な計算が可能になります。
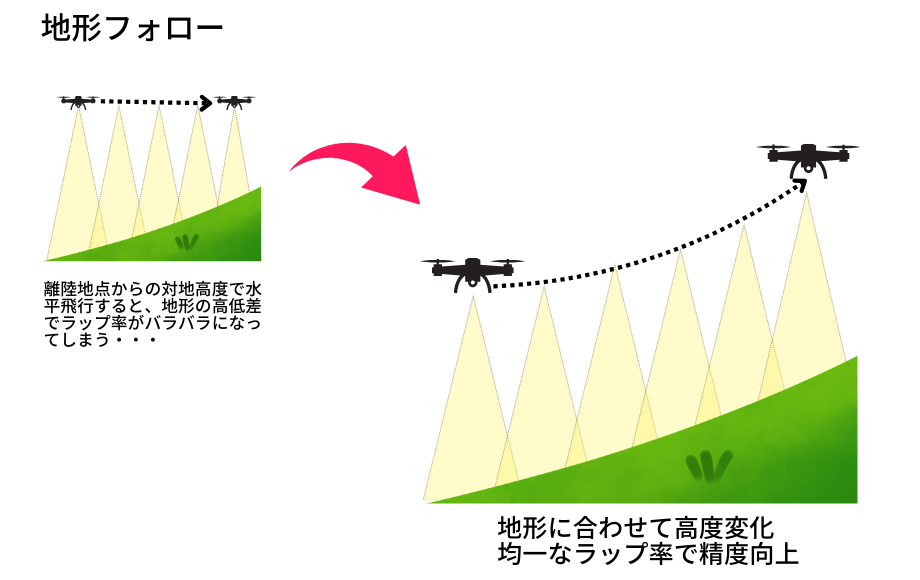
4.地形フォローモード
起伏のある地形を測量する場合、高低差に合わせて飛行高度を変化させながら撮影する機能です。これにより写真のラップ率が均一になりデータの精度が向上します。
事前に準備しておいた地形データ(DSMデータ)を読み込ませることで相対高度を維持したルートを設計できる製品と、飛行中のドローンがリアルタイムに地形をスキャンし、高低差に合わせて相対高度を維持する(リアルタイム地形フォロー)製品があります。
写真測量対応ドローン4選
DJI Matrice 400

DJI産業用ラインナップの最新製品です(2025年8月現在)。
写真測量では後述のZenmuse P1が搭載可能です。

ドローン専用フルサイズセンサーカメラ。3種類の単焦点レンズを交換可能。
最長59分の長時間飛行、全方位型障害物検知システム、リアルタイム地形フォローに対応。
RTK測位だけでなく、GPS測位精度を向上させるPPPモードが搭載されており、あらゆる環境で高精度な写真測量を行います。
最大6kgの積載量で、レーザースキャナやグリーンレーザーなどの計測機器も搭載できます。
フルサイズセンサーカメラDJI Zenmuse P1を搭載することで、解像度を維持しつつ小型機より高高度かつ広角での撮影が可能です。
DJI Matrice 300/350 RTK

Matrice 400の前行機です。
最大55分の飛行時間にスマートオブリーク撮影(自動での斜め撮影)、地形フォローモード(リアルタイム非対応)など写真測量に必要な機能は全て網羅されています。
Matrice 400がリリース間もないこともあり情報が限られているため、DJI Matrice 300/350 RTKが測量業界において最も信頼性が高く使用されている製品かもしれません。
Zenmuse P1との組み合わせで世界中の測量現場で運用されています。
DJI Matrice 4 Enterprise

Mavic 3 Enterpriseの後継機として発表されました。
複数の高性能カメラを搭載していて、写真測量で使用できる広角カメラは20MPの4/3インチCMOSセンサーとメカニカルシャッターを備えています。
新機能「スマート3Dキャプチャー機能」では、真俯瞰撮影後に送信機内で簡易的な3Dモデルを生成し、建造物などのモデリングに必要な複雑な自動航行ルートを自動的に生成することができます。
リアルタイム地形フォローにも対応。
小型・軽量で可搬性に優れる点も特徴です。
DJI Mavic 3 Enterprise

Matrice 4 Enterpriseの前行機です。
20MPの4/3インチCMOSセンサーとメカニカルシャッターに地形フォロー機能(リアルタイム非対応)、オブリーク撮影、RTK測位(別付けRTKモジュールが必要)などの写真測量に必要な機能はしっかりと網羅しています。
バッテリーやプロペラは他のMavic 3シリーズと互換性があります。
最後に ~写真測量のまとめ~
いかがだったでしょうか。測量会社さんであれば、上記機材とあわせて点群処理ソフト、PCがあればすぐに写真測量を始めることができます。
点群処理ソフトも当社で販売可能ですので、「これから写真測量を始めたい」「ドローンとソフトをセットで提案してほしい」などご要望がございましたら、問い合わせフォームよりお気軽にお申し付けください。
よろしくお願いいたします。
問い合わせフォームはこちら
コメント